УРОК 1 Подтверждение эксплуатационной безопасности
1. Меры предосторожности:
1) Операторы машин должны пройти профессиональную подготовку по технике безопасности и освоить безопасные и правильные методы работы.
2) При любых обстоятельствах необходимо сначала отключить питание машины для технического обслуживания (нажмите EMG).
3) Не допускайте попадания какой-либо части тела в рабочий диапазон машины во время работы.
4) Предохранительное устройство машины всегда должно находиться в загрузочном состоянии.
2. Подтвердите различные предохранительные устройства:
1) Кнопка аварийной остановки EMG - передняя и задняя часть корпуса машины, ATS и т. Д.
2) Датчик площади AREA и датчик обнаружения фидера - с обеих сторон передней части машины.
3) Выключатель блокировки крышки - передняя и задняя крышки машины, а также двери АВР.
3. Несколько форм отключения:
1) Нажмите EMG, машина не может работать, а серводвигатель находится в выключенном состоянии (горит красный свет).
2) Датчик площади активирован, машина не может работать, а серводвигатель находится во включенном состоянии (желтый свет)
3) Устройство блокировки активировано, машина не может работать, а серводвигатель находится во включенном состоянии (желтый свет).
4) Непосредственно остановите машину. Во время производственного процесса нажмите клавишу STOP или пробел, и машина не запустится. Серводвигатель будет находиться во включенном состоянии (желтый свет).
5) Ошибка отключения, вызванная неправильной идентификацией точки MARK компонентов или подложек, а также проблемами с извлечением компонентов (отсутствие данных и плохой фидер). Машина не может работать, а серводвигатель находится во включенном состоянии (мигает желтый свет).
6) Остановка цикла, остановка цикла. В процессе производства активируйте кнопку остановки цикла на экране. Подождите, пока машина выполнит текущую задачу, прежде чем останавливаться (ее нельзя остановить сразу). Машина не может работать, и сервопривод переходит во включенное состояние (желтый свет).
УРОК 2 Проверка изделий перед производством
1) Нормально ли текущее значение давления воздуха?
Стандартное значение YAMAHA YV100Xg: 0,55 +/- 0,5 МПа
2) Было ли деактивировано устройство аварийной остановки?
Внимание: Перед выпуском предохранительного устройства необходимо проверить безопасность.
3) Нормально ли позиционирование дорожки и подложки?
Есть ли на гусенице какие-либо посторонние предметы, и различные части конвейерной системы не будут сталкиваться друг с другом во время работы (например, PIN-код SUPPORT и гусеница)? Подходит ли метод позиционирования субстрата?
4) Нормально ли состояние монтажной головки?
A. Правильно ли установлена форсунка
B.Is состояние датчика в норме?
5) Правильно ли установлен фидер?
А. Инспекция материалов;
B. Проверьте состояние установочного положения FEEDER;
C. Включает проверку TRAY.
УРОК 3: Включение питания
1) Подтвердите безопасность и проведите проверки по пунктам LESSON1.
2) Включите питание, загрузите необходимые операционные программы на машину и сверьтесь с пунктами в УРОКЕ 2.
3) Выполните сброс источника Каждый раз, когда отключается питание и машина перезапускается, необходимо возвращаться в исходную точку.
4) Укажите имя пользователя для входа в систему (можно указать разных пользователей для входа в систему и использования аппарата на основе предварительно установленных разрешений на работу).
5) Выполните разминку. Время прогрева можно установить по мере необходимости. Рекомендуемое время разогрева должно составлять не менее 10 минут.
УРОК 4 Освойте основные операции
1. Знакомство с аммонийными кнопками и периферийными устройствами на машине.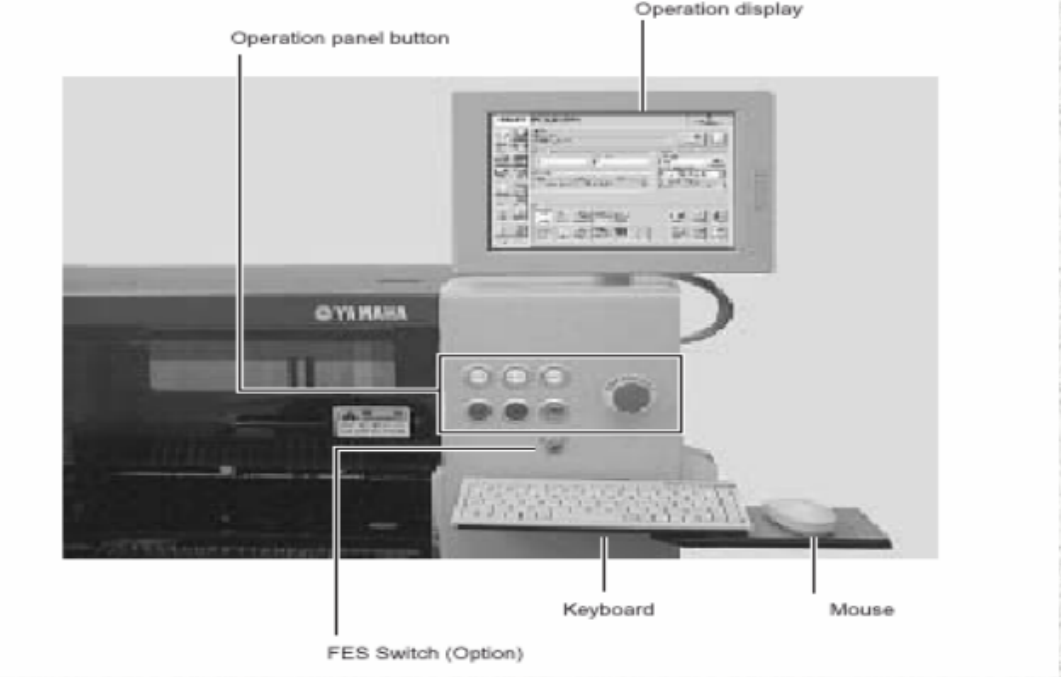 2. Понимать основной состав экрана работы программы YAMAHA.
2. Понимать основной состав экрана работы программы YAMAHA.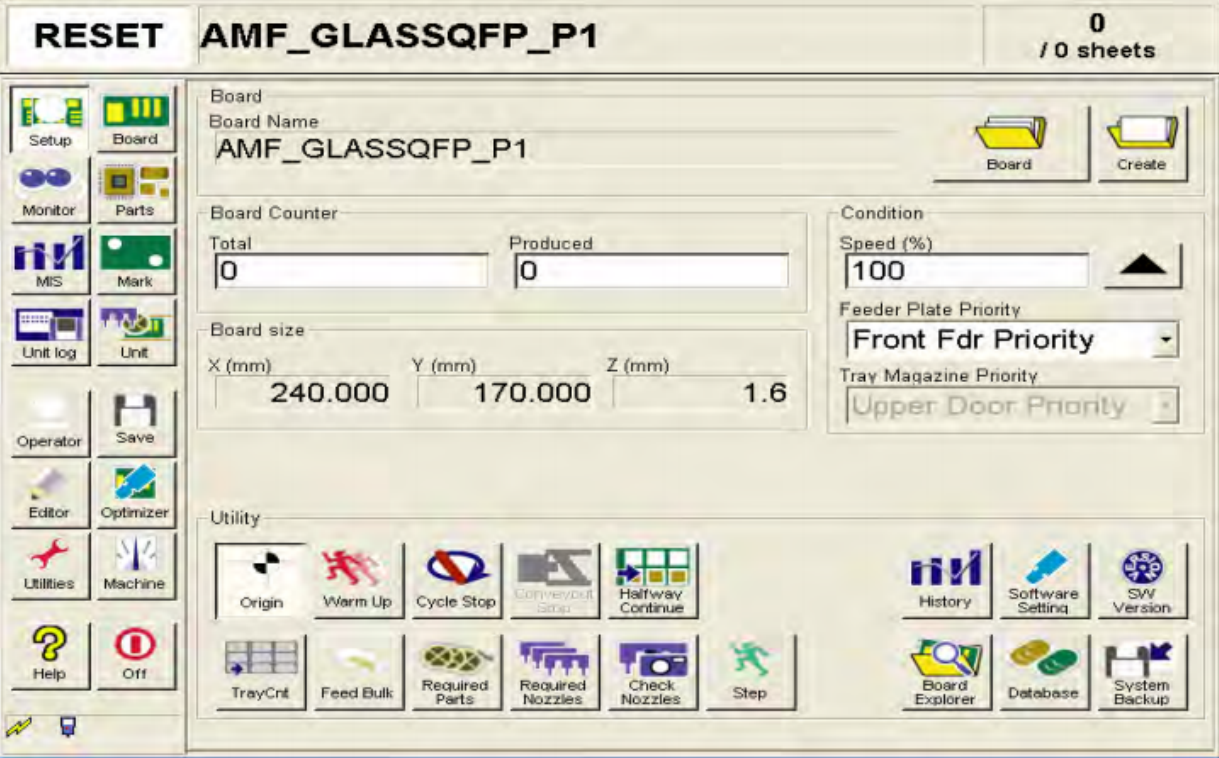 3.Введение в основной интерфейс SETUP.
3.Введение в основной интерфейс SETUP.
4.SETUP-Введение в утилиту(一)
1). Начало: Все движущиеся части машины возвращаются в исходное положение (двигатель возвращается в нулевую точку).
2). Разминка: Разогрев машины.
3). Остановка цикла
4). Остановка выхода конвейера: остановка после удаления субстрата.
5). Продолжение на полпути: Из-за остановки на полпути производство будет продолжено.
6). Количество лотков: Установите текущее положение всасывания с диска TRAY.
7). Объем корма: Состояние использования вибрационных питателей.
5.SETUP-Utility Введение (二)
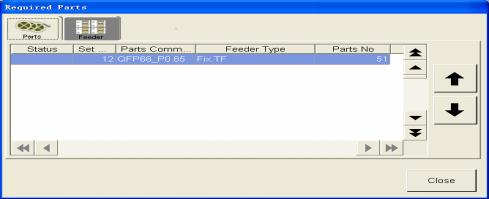
8). Обязательные детали (список необходимых материалов)
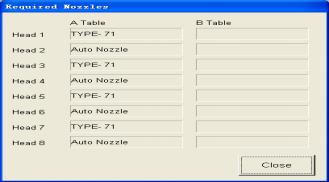
9). Необходимые форсунки (Запросить информацию о соплах)
10). Проверка сопла: проверка состояния сопла.
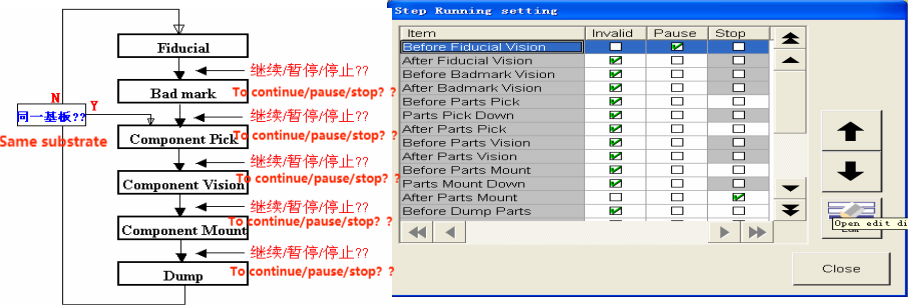
6.SETUP-Utility Введение (三)
11). Настройка потока действия производственного цикла станка STEP.
12). Журнал: укажите, что необходимо отображать производственную информацию.
13). Мягкие настройки: настройки методов ввода, соответствующих мест хранения информации и разрешений пользователей.
14).SW vision: Просмотр информации о версии YAMAHA.
УРОК 5 Сборка данных подложки(Создание программы)
1. Процесс компиляции программы установки компонентов.
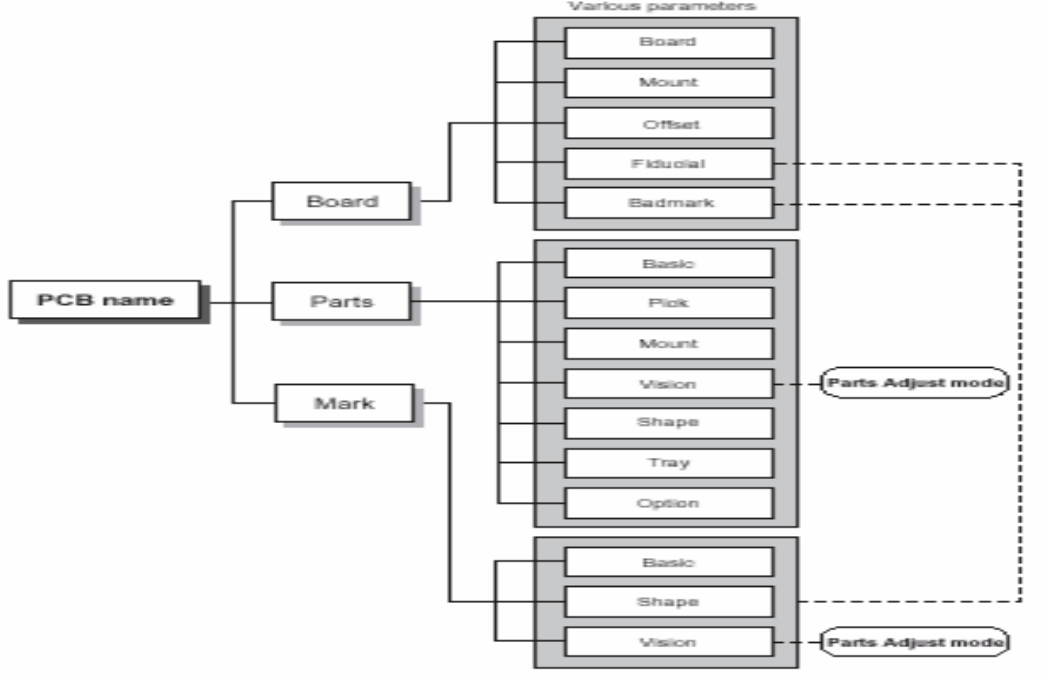
2. Состав данных субстрата:
1.Создайте имя субстрата
1) Метод прямого создания: введите название субстрата и определите его свойства (и расширение).
2) Метод модификации копирования: вызовите исходную программу и измените только некоторые параметры в подложке (для разных версий одного и того же продукта программирование может сэкономить время и улучшить выполнение программы.)
3) Объяснение атрибутов XML, VIOS, TXT.
A.XML формат, разработанный YAMAHA WINDOWS
Операционная система. Улучшенная функция отображения графики.
B.VIOS используется для работы с операционной системой YAMAHA DOS и совместим с текущей системой YAMAHA WIDOWS.
C.TXT часто используется для резервного копирования программ и не может быть напрямую использован в производстве, требуя преобразования.

2. Вводимая информация о подложке (Описание некоторых функциональных элементов:)
1). Счетчик платы: укажите количество подложек, которые уже были произведены.
2). Prod.Board Counter Max: установите запланированный общий объем производства.
3). Счетчик блоков: при изготовлении соединительных плат определите количество нескольких небольших плат на большой плате.
4). Счетчик разгрузчика: укажите количество подложек, прошедших разгрузку.
5). Счетчик разгрузчика Макс: установите, сколько частей печатной платы можно поместить в коробку РАЗГРУЗЧИКА одновременно.
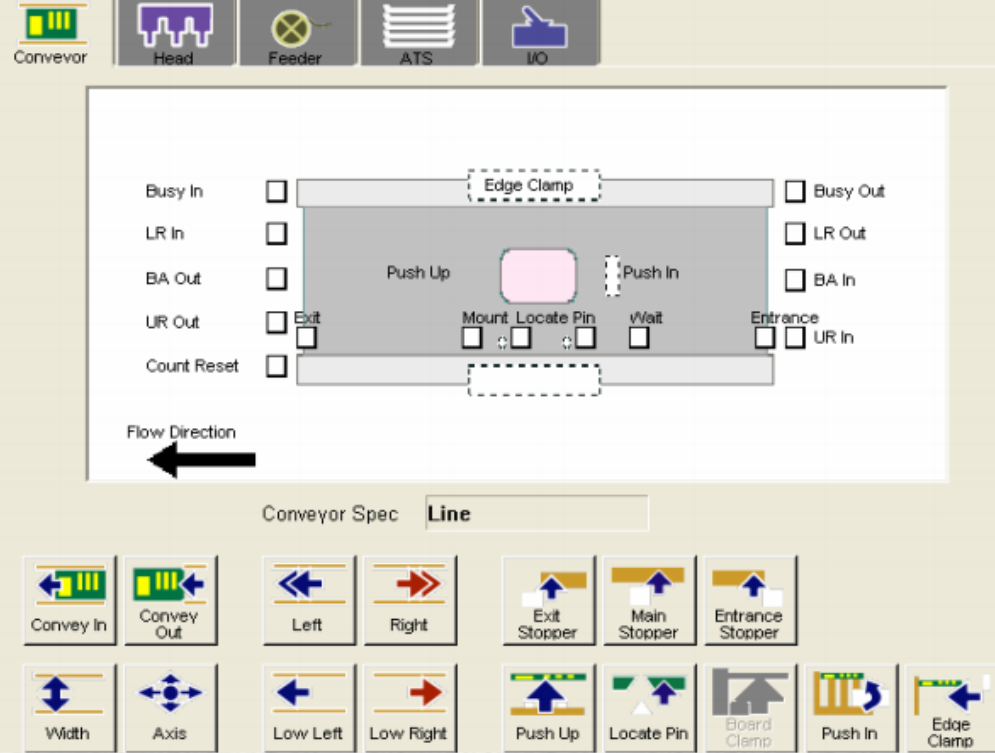
6). Устройство фиксации платы:
Зажим края --- зажим края + PushIn + штифт PushUp
Найдите контакт --- только с помощью «Найти контакт» для защищенной печатной платы
Pin+PushUP--- Найдите булавку + булавку PushUp (рекомендуемый метод)
7). Пре. Исправление таймера сек: Когда ДАТЧИК ОБНАРУЖЕНИЯ ПЕЧАТНОЙ ПЛАТЫ обнаруживает печатную плату, требуется много времени, чтобы зажать печатную плату.
8). Транс-высота: Когда производственная подложка состоит из двух панелей и сзади есть запасные части, во избежание помех запасным частям из-за недостаточного уменьшения PIN-кода PUSHUP, здесь устанавливается расстояние уменьшения PIN-кода PUSHUP.
9). Секундный таймер конвейера: для некоторых субстратов неправильной формы.
Когда SENSOR обнаруживает свою последнюю кромку, требуется поздний КОНВЕЙЕР
Время передачи MOTOR необходимо для того, чтобы он нормально вытекал из машины.
10). Последовательность повторных попыток: ГРУППА— При ненормальном распознавании волос во время определенной установки подождите, пока не будут установлены все восемь всасывающих головок, а затем используйте эту установочную головку для повторного всасывания этого компонента.
БЛОК----Когда на определенном участке волос есть аномалии распознавания, подождите, пока все участки BLOCK (или BOARD) не будут завершены, а затем используйте эту патч-головку для повторного извлечения.
ATUO----Когда есть ненормальное распознавание волос на определенном участке, подождите, пока все участки BLOCK (или BOARD) не будут завершены, а затем используйте простаивающую головку патча для повторного рисования.
11). Предварительная проверка: следует ли использовать функцию раннего всасывания (увеличить производительность)
12). Приоритет лотка: При использовании производства материалов TRAY включите эту функцию, чтобы своевременно извлекать материал из TRAY в зависимости от ситуации с его поставкой.
УРОК6 Информация о компонентах сборки
1. Описание функции BASIC
1. Описание функции BASIC
1). Группа выравнивания: определите категорию компонентов.
2). Выравнивание: определите тип компонента.
3). Требуемое сопло: используемая модель сопла.
4). Упаковка: Тип упаковки компонентов.
5). Тип фидера: типы использования фидера.
6). Путь отвала: место утилизации
7). Время повтора: количество раз для повторного поглощения.
8). Номер базы данных: вызовите номер библиотеки компонентов.
1. Описание функции элемента PICK
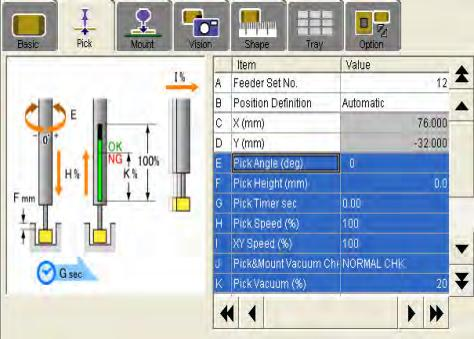 1). Определение положения: Определение положения всасывания для FEEDER.2). Угол подъема: направление по часовой стрелке указывает на положительное увеличение, а направление против часовой стрелки указывает на отрицательное увеличение. Исходное значение 0 градусов обычно рассматривается как 0 градусов на длинной стороне материала в питателе.3). Высота выбора: поглощает высокие уровни Когда НАКОНЕЧНИК СОПЛА соприкасается с верхней поверхностью ленты, он показывает положительное увеличение от 0 до 0.4). Таймер выбора: время паузы, когда головка стружки опускается в самое низкое указанное положение для всасывающего компонента.5). Скорость выбора: переместите головку чипа в назначенное положение (над FEEDER), чтобы уменьшить скорость всасывающего компонента.6). Скорость XY: скорость движения XY склеивающей головки.7) Проверка вакуума при захвате и монтаже: следует ли выполнять определение значения вакуума.НОРМАЛЬНАЯ ПРОВЕРКА: обычно используется для определения того, поглощает ли компонент, путем изменения значения вакуума во время поглощения компонента.СЕПЦИАЛЬНАЯ ПРОВЕРКА:Выбор этой опции может точно определить аномальное всасывание компонента, но это увеличит время всасывания компонента, которое обычно не используется.(ПРИМЕЧАНИЕ: Приведенная выше ПРОВЕРКА ВАКУУМА действительна только в том случае, если включен элемент ПРОВЕРКА ВАКУУМА в информации о подложке)ИГНОРИРОВАТЬ: значение вакуума поглощается необнаруживающими компонентами.
1). Определение положения: Определение положения всасывания для FEEDER.2). Угол подъема: направление по часовой стрелке указывает на положительное увеличение, а направление против часовой стрелки указывает на отрицательное увеличение. Исходное значение 0 градусов обычно рассматривается как 0 градусов на длинной стороне материала в питателе.3). Высота выбора: поглощает высокие уровни Когда НАКОНЕЧНИК СОПЛА соприкасается с верхней поверхностью ленты, он показывает положительное увеличение от 0 до 0.4). Таймер выбора: время паузы, когда головка стружки опускается в самое низкое указанное положение для всасывающего компонента.5). Скорость выбора: переместите головку чипа в назначенное положение (над FEEDER), чтобы уменьшить скорость всасывающего компонента.6). Скорость XY: скорость движения XY склеивающей головки.7) Проверка вакуума при захвате и монтаже: следует ли выполнять определение значения вакуума.НОРМАЛЬНАЯ ПРОВЕРКА: обычно используется для определения того, поглощает ли компонент, путем изменения значения вакуума во время поглощения компонента.СЕПЦИАЛЬНАЯ ПРОВЕРКА:Выбор этой опции может точно определить аномальное всасывание компонента, но это увеличит время всасывания компонента, которое обычно не используется.(ПРИМЕЧАНИЕ: Приведенная выше ПРОВЕРКА ВАКУУМА действительна только в том случае, если включен элемент ПРОВЕРКА ВАКУУМА в информации о подложке)ИГНОРИРОВАТЬ: значение вакуума поглощается необнаруживающими компонентами.
8.Выберите вакуум (%):D укажите соотношение значений вакуума всасывающего компонента (по отношению к параметру машины MONITOR LEVEL, насколько он направлен вниз? Это означает, что всасывающий элемент считается нормальным.)9). Выберите «Пуск»: укажите время включения пылесоса.НОРМАЛЬНЫЙ—Опустите монтажную головку на определенную высоту и откройте ВАКУУМНЫЙ КЛАПАН.ДНО—Подождите, пока монтажная головка не опустится в указанное нижнее положение и не коснется корпуса компонента, прежде чем открывать ВАКУУМНЫЙ КЛАПАН.10). ВЫБЕРИТЕ ДЕЙСТВИЕ: Укажите действие извлечения (или присоединения) компонентов вниз.НОРМАЛЬНЫЙ--- Для общих компонентов он обычно используется (нормальная скорость и ускорение)QFP --- подходит для QFP, BGA и компонентов размером более 32 * 32 мм, которые используют идентификацию MULTI CAMERA. Обеспечьте точность установки и защиту компонентов.FINE --- подходит для QFP, BGA и компонентов с размерами более 32 * 32 мм и идентифицируется ОДНОЙ КАМЕРОЙ. Обеспечьте точность установки и защиту компонентов.ПОДРОБНОСТЬ—Выполните более подробные настройки действия PICK ACTION. После включения этой функции выполните следующие действия PICK TANGO; Функции PICK DOWN и PICK UP могут быть только изменены. 11). ВЫБЕРИТЕ ТАНГО: НОРМАЛЬНОЕ—Обычно используют TROL - подходит для высокоточного монтажа микрокомпонентов.12). PICK DOWN:Эта функция не используется (НЕИСПРАВНА)13). ЗАБРАТЬ: Нет использования этой функции (НЕИСПРАВЕН)3. Введение в функцию MOUNT

1). Высота крепления: установите расстояние для нажатия на монтажную головку (вниз положительно, вверх отрицательно).
2). Таймер монтажа: время, когда монтажная головка и монтажные компоненты остаются в самой низкой точке.
3). Скорость монтирования и скорость XY:
То же, что и скорость выбора (ПРИМЕЧАНИЕ: При изменении здесь соответствующие параметры выбора также изменяются одновременно)
4). Проверка вакуума Pick&Mount//Mount Vacuum%//Mount Action//Mount Tango// Mount Down//Mount Up: ((Аннотации см. в описании элемента функции PICK)
4.Введение в функциональные элементы VISION
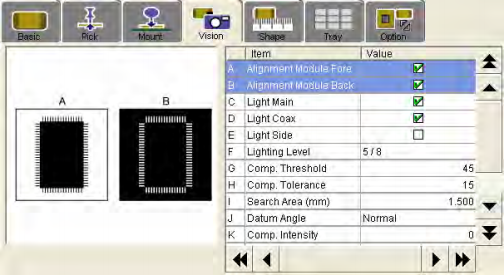
1). Модуль выравнивания Fore&back:Укажите метод идентификации компонентов, обычно выбирая оба.
2). Свет главный и коаксиальный и боковой: контроль идентификации источников света. Выбирайте различные источники света в зависимости от разных компонентов. Обычно используется только Light Main&Coax, в то время как Light Side распознает только BGA и может обнаружить его на наличие трещин.
3). Уровень освещения: яркость света.
4). Comp Threshold:Определите соотношение серого компонентов идентификации.
5). Comp Tolerance: допустимая ошибка распознавания.
6). Область поиска:Диапазон поиска контактов компонентов.
7). Угол отсчета: определите углы компонентов с помощью.
8).Comp. Интенсивность: интенсивность света компонента.
9). Несколько MACS: (опция)
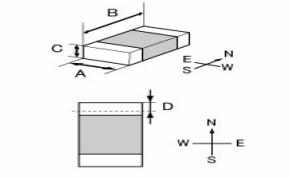
5. Функция формы Введение
1). Группа выравнивания: определите общую категорию компонентов.
2). Тип выравнивания: определите тип компонента.
3). Смещение правила: из-за нестандартной формы компонента при идентификации компонентов. При вычислении размера графика допускается вычитание некоторого значения компенсации внутрь.
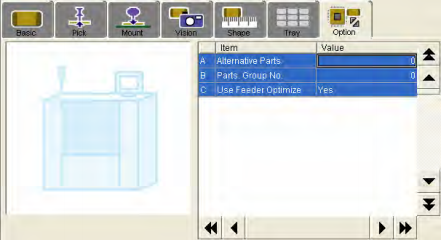
6. Информация о лотке и функциях опций
А.Трей
1). Упаковка: Способ упаковки компонентов
2). Тип фидера: модель фидера
Б. ВАРИАНТ
1). Альтернатива: установите номер станции сменного материала.
2). Parts.Group NO: различают порядок установки компонентов.
3). Используйте оптимизацию фидера: разрешать ли перепланировать данные станции этой станции во время оптимизации программы.
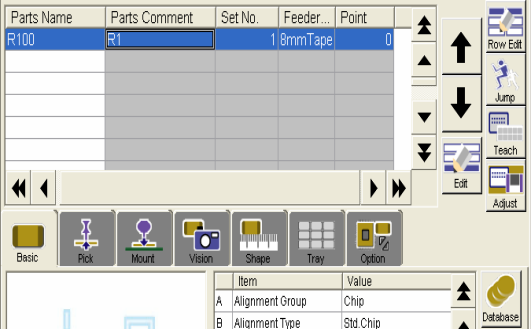
Попробуйте отредактировать компонент
О: Введение в элемент функции
1). РЕДАКТИРОВАТЬ
2). Управление панелью редактирования строк
3). Выбор прыжка
4). Регулировка положения всасывания TECH
5). Отрегулируйте комплексную настройку параметров компонента.
B. Редактирование метода компонента (порядка)
Создайте имя компонента, добавьте решение к компоненту, задайте параметры компонента, проверьте положение всасывания компонента и комплексно отрегулируйте параметры компонента (ADJUST). Сохраните настройки сейчас.
C: Практическое управление: возьмите любой материал, исправьте параметры в зависимости от фактического положения материала и выполните машинное распознавание.
УРОК 7 Установите информацию MARK
1. Введение элемента: Basic&Shape Function
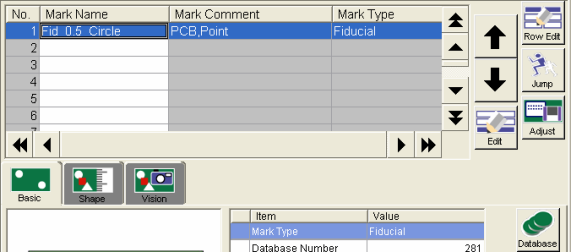
А. Основные
1). Тип метки:Тип использования
2). Номер базы данных:Вызов точек MARK
Номер базы данных
Б.Форма
1). Тип формы: тип формы MARK
2). Размер разметки: периферийные размеры точек MARK.

2. Введение в элемент функции видения
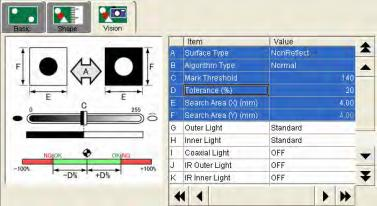
1). Тип поверхности: тип поверхности Марка
2). Тип алгоритма:Обычно выбирается оператор NORMAL.
3). Порог отметки: соотношение серого
4). Допуск: допустимый диапазон погрешности
5). Область поиска X&Y:область поиска точек метки
6). Внешний свет // Внутренний свет // Коаксиальный свет // ИК Внешний свет // ИК Внутренний свет: Укажите подробную яркость источника света ДВИЖУЩЕЙСЯ КАМЕРЫ
7). Вырезать наружу // Внутренний шум: При распознавании точек MARK наблюдаются внешние или внутренние дефекты изображения。
8). Последовательность:Определение скорости идентификации точек MARK
ОБЫЧНЫЙ---- Обычно используется
QUICK------Быстрая идентификация и повышение скорости распознавания точек MARK
FINE----Используется для повышения точности распознавания точек MARK в условиях высокой точности.
3.Попробуйте отредактировать МЕТКУ (контрольную точку) и идентифицировать ее
A. Введение в элемент функции
1). РЕДАКТИРОВАТЬ
2). РЕДАКТИРОВАНИЕ СТРОКИ Управление столбцами
3). Выбрана полоса перехода
4). Отрегулируйте параметр всесторонней регулировки
B. Редактирование метода компонента (порядка)
Введите имя MARK и добавьте решение. Задайте параметры MARK. Проверьте положение MARK (координаты MARK должны быть установлены в информации о печатной плате). Комплексная настройка параметров MARK (ADJUST) и сохранение настроек
C: Практические занятия: Возьмите образец и попробуйте отредактировать его в BOARK MARK, BLOCK MARK, BAD MARK и выполните машинное распознавание。
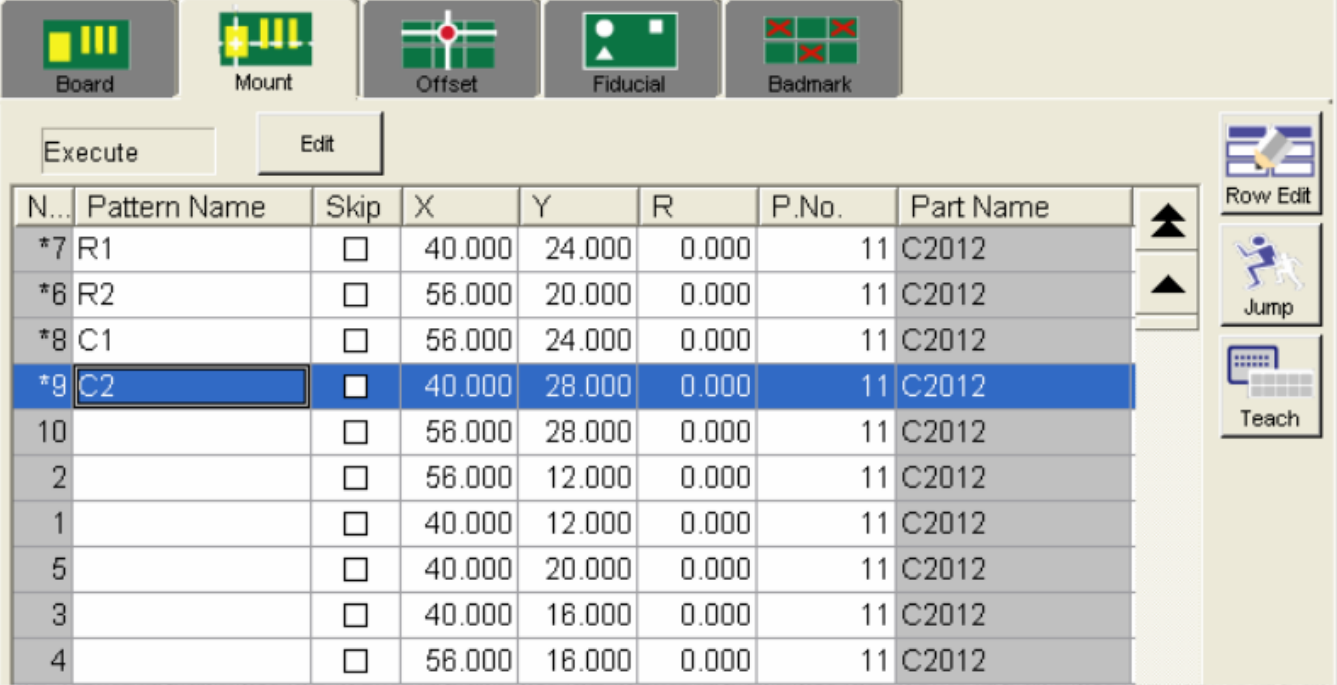
УРОК 8 Установка информации о монтировании
1. Информация о MOUNT
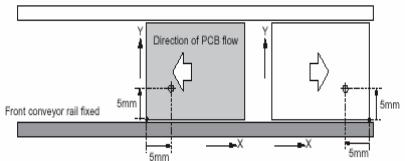
Информация о СМЕЩЕНИИ
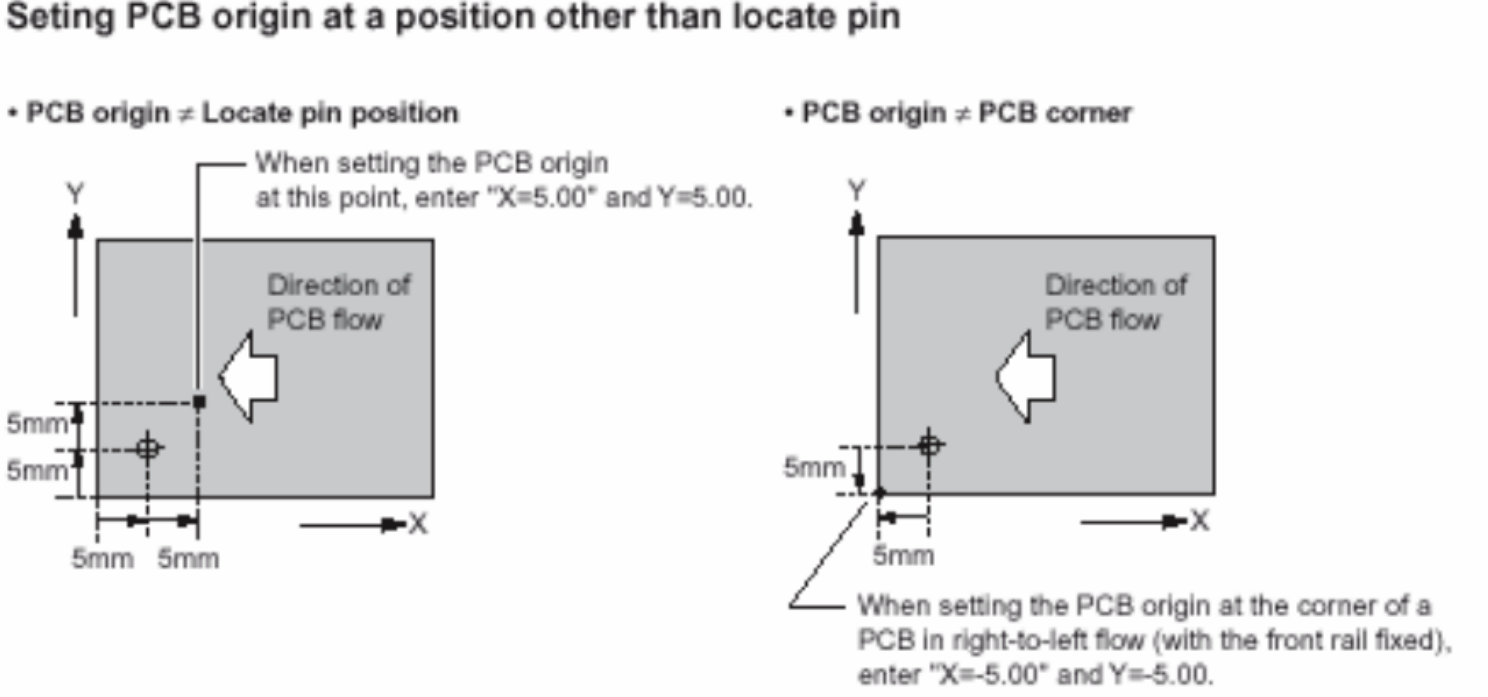
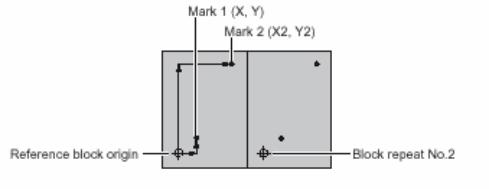
1). Происхождение платы:
Машинная подложка по умолчанию
Найти Пин - это начало координат (0,0)
В фактическом производственном процессе,
Для облегчения редактирования программы и
требования к взаимозаменяемости данных,
левый нижний угол подложки устанавливается как ORIGIN.
Теперь координаты начала доски равны (-5,-5),
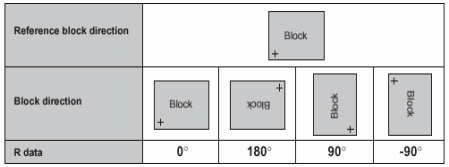
2). Угол блока R: по часовой стрелке положительный, и наоборот отрицательный (0,90,180,-90)
* Когда BOARD ORIGIN не равен LOCATE PIN POSITIONION
* Моделирование шаблонного обучения (расчет смещения и происхождения доски)
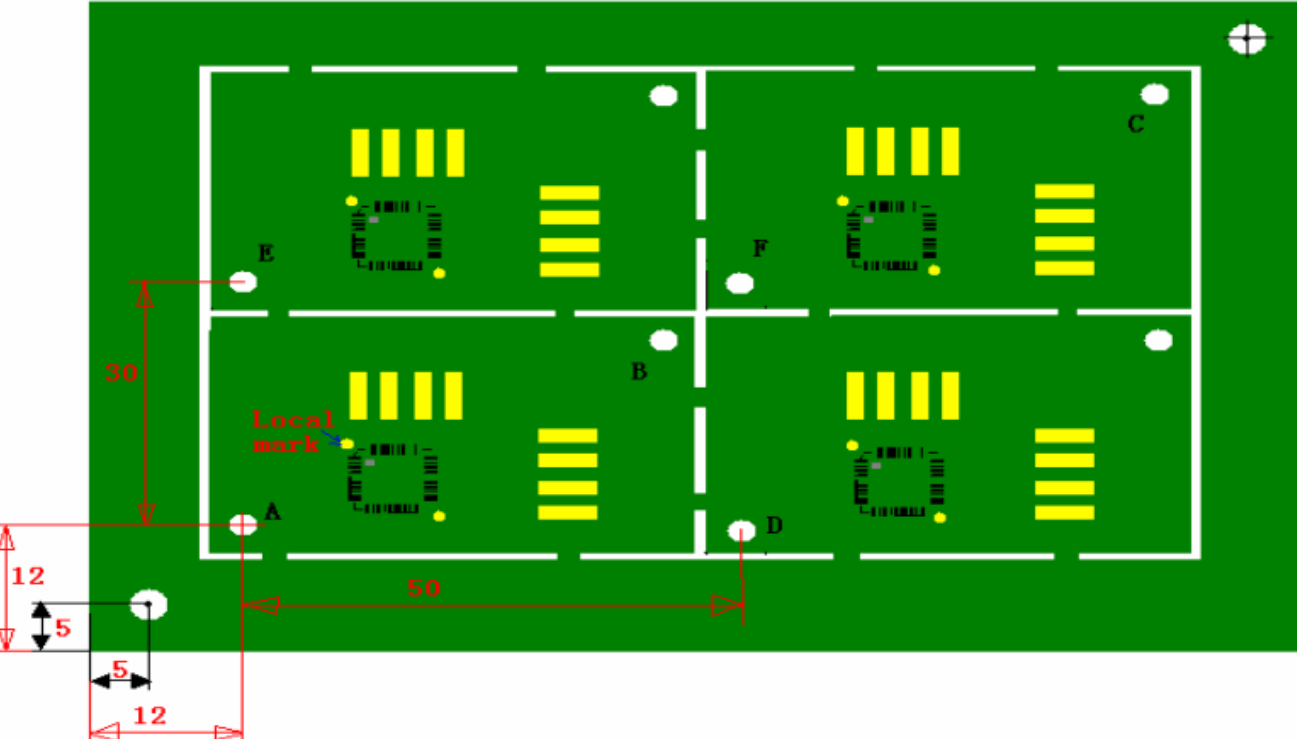
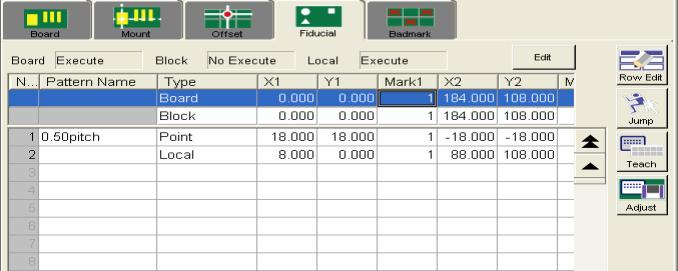
3. Фидуциальная (ориентировая) информация
1). Функция EDIT: использовать или не использовать определенный тест.
2) . Выбор опции TYPE: «Local, Point, 4Local M, 4Local S» является объяснением цели позиционирования при позиционировании локальных компонентов
3). Для Local Fiducial можно установить только одну контрольную точку. Кроме того, установка «0» для X2, Y2 и MARK2 не будет использоваться по умолчанию.
4. Информация о плохих метках
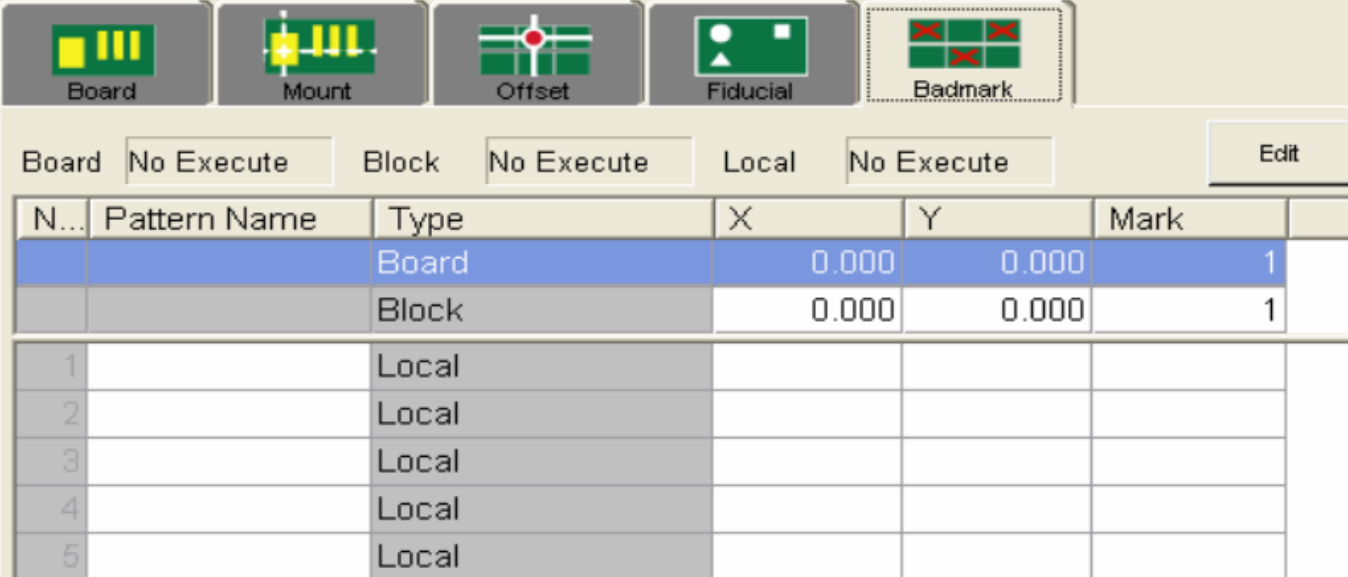
ПРИМЕЧАНИЕ: BAD MARK может быть установлен в зависимости от ситуации, к какому из трех типов относится: BOARD, BLOCK и LOCAL.
УРОК 9 Отредактируйте простую программу подложки и выполните установку
1. Скомпилируйте программу субстрата;
2. Регулировка транспортирующего устройства (правильное крепление подложки к гусенице);
3. Подтвердите соответствующую информацию, такую как материалы и всасывающие форсунки;
4. Проверьте, подходит ли положение всасывания;
5. Установите скорость производства;
6. Выполнить производство;
7. Проверьте состояние после установки.
УРОК 10 Сгенерируйте данные связанной платы и приступайте к установке второй платы
1. Если данные первой подложки верны, введите фидуциальную информацию второй платы
2.Введите информацию OFFSET для второй платы
3. Подтвердите положение подложки и приступайте к установке.
4. Проверьте состояние после установки (исправления)
УРОК 11 Реализация оптимизации программы
1). Настройки сопла
FREE — не указано
CURRENT-Использовать текущие настройки
РЕДАКТИРОВАНИЕ —Формулирование
2). Настройки фидера
Нет — нет оптимизации для второстепенных терминов
Все фидеры фиксированы — текущая настройка остается неизменной
Нет перемещения установленных Pos фидеров — оптимизация не указана
Перемещение в пределах таблицы — разрешить оптимизацию в пределах одной таблицы
Все кормушки перемещаются — оптимизируйте все
Move+Fixed Data Match — обозначение мобильной и неизменяемой справочной программы
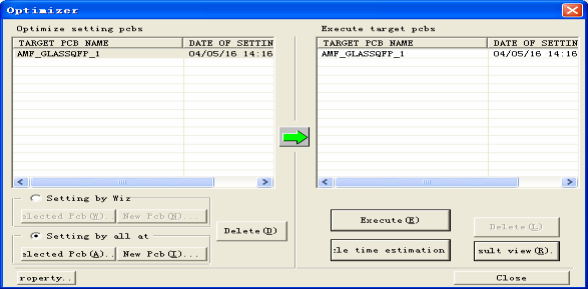
3). Порядок оптимизации исполнения (Процедура)
A.Выберите программу
B.Разверните данные в элементе функции EDIOR
C. Сохраните развернутую программу
D.Снова выберите развернутую программу с помощью параметра «Оптимизировать»
E. Установите условия оптимизации (сопло, фидер и т. Д.)
F.Сохранить настройки для условий оптимизации
G.Оптимизация исполнения
H.Проверьте результаты скремблирования и сохраните данные
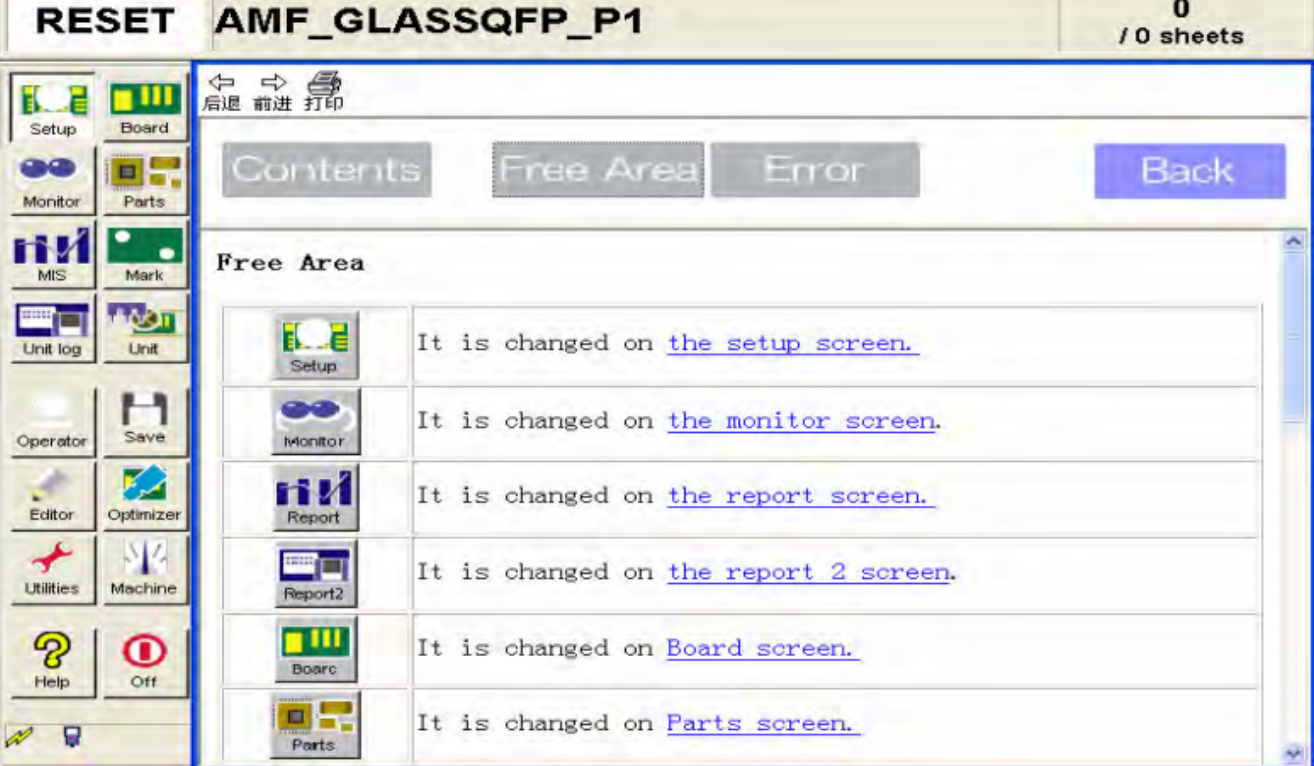
УРОК 12 Введение в другие общие предметы — «МОНИТОР»
1.ГЛАВНАЯ

2. Деталь
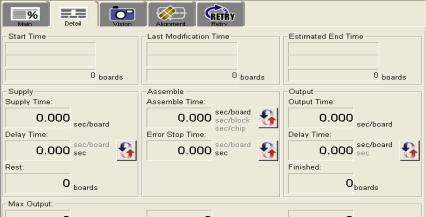
3. Видение
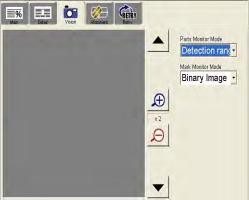
4. Выравнивание

5.Повторите попытку
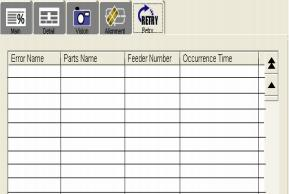
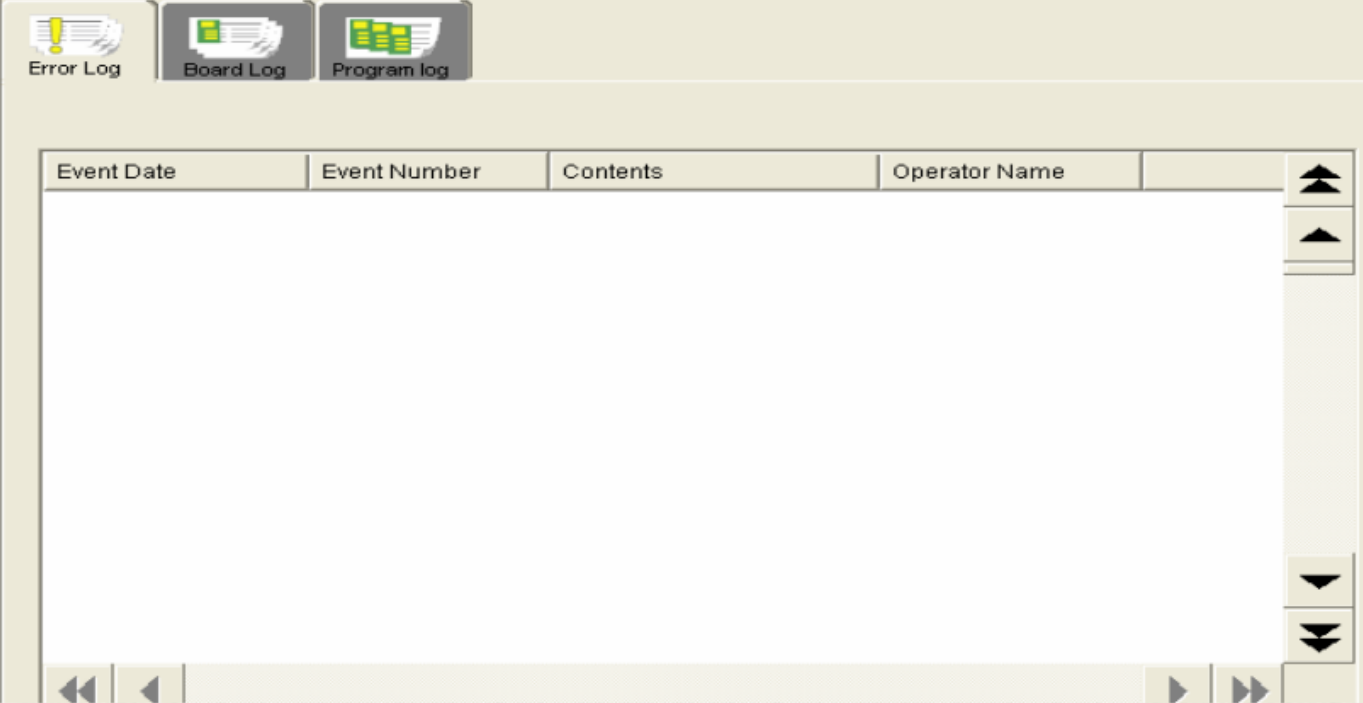
Введение в элементы MIS
1. Журнал ошибок 2. Журнал платы 3. Журнал программы
Введение в журнал устройств
1). ГОЛОВА
2). СОПЛО
3). КОРМУШКА
4). КОНВЕЙЕР
5). КОМПЛЕКТУЮЩИЕ
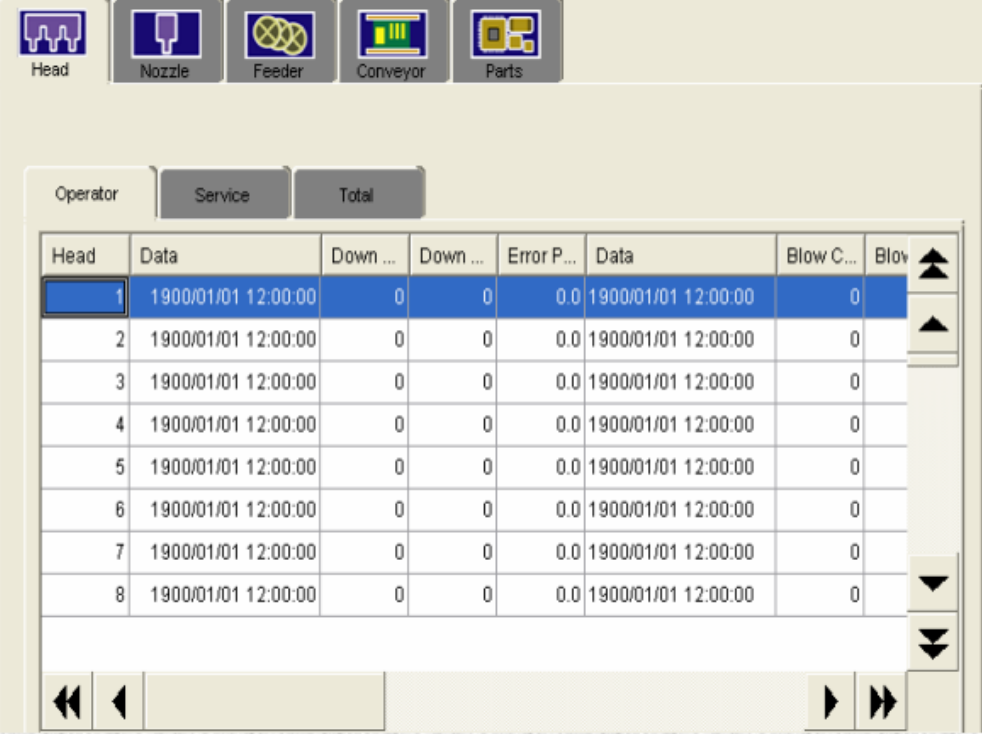
ПРИМЕЧАНИЕ: Классифицируйте и рассчитывайте количество и частоту дефектов, генерируемых каждым компонентом.
Введение в пункт UNIT
1). Конвейер, головной питатель, ATS, I / 0.
2). Общие элементы включают фиксацию подложки, замену форсунок, проверку FEEDER и индивидуальное перемещение движущихся частей машины (полезно для проверки и устранения неисправностей).
Общие сведения об элементах справки
УРОК 13 Связанное резервное копирование данных
1.Резервное копирование производственных программ

2.База данных
1). РЕЗЕРВНОЕ КОПИРОВАНИЕ: резервное копирование данных (исходящее)
2). ВОССТАНОВЛЕНИЕ: вызов данных (вход)
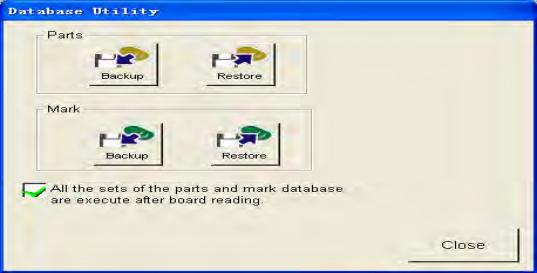
3). ЗАМЕТКА:
Все наборы деталей и базы данных меток выполняются после считывания платы
3. Резервное копирование параметров машины
1). FORMAT: форматирование дискеты
2). РЕЗЕРВНОЕ КОПИРОВАНИЕ: резервное копирование данных (исходящее)
3). ВОССТАНОВЛЕНИЕ: вызов данных (вход)

УРОК 14 Ежедневный ремонт и техническое обслуживание машины (DAILY PM)
1. Проверьте состояние форсунки и очистите ее;
2. Чистая платформа доставки;
3. Проверьте статус вывода полосы;
4. Проверьте и очистите систему COVNEYOR;
1). Ремень, шкив, датчик и т. Д.
5. Чистая камера. Очистите от пыли и грязи.














































